
WALL-E is one of the cutest robots we have ever seen. Just like WALL-E made his name in the outer space, NASA’s BILL-E robot is about to achieve the same. BILL-E is a bipedal robot designed to perform spacewalks outside a spacecraft. This may help NASA to perform repairs on spacecraft or add new modules to the spacecraft. BILL-E can travel across a periodic lattice structure, as well as being able to handle, manipulate, and transport building block parts that compose the lattice structure.
BILL-E stands for Bipedal Isotropic Lattice Locomoting Explorer. Basically, it is a bipedal robot which can transverse on isotropic lattice structures i.e. having a similar property in all directions (as shown in the figure below).
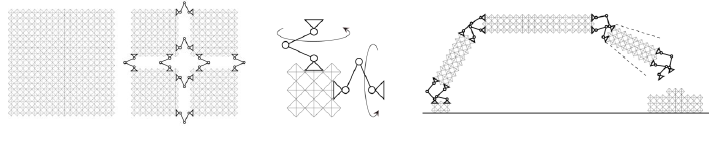
BILL-E is designed to operate within a specifically structured environment, which restricts its motion to only certain directions. This allows for simple controls, as well as low mass and low cost. This approach of designing the robot relative to the local environment in which it operates results in a type of robot known as a “relative robot.”
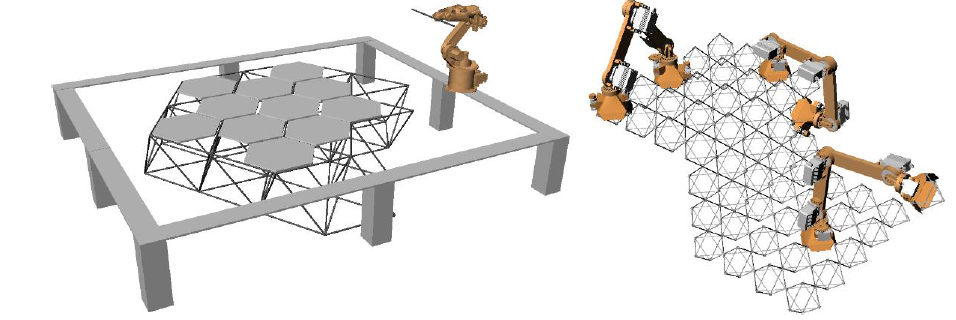
As shown in figures above, compared to the traditional gantry based robotic arm, the relative robotic system has more freedom and can move more freely through the lattice structure.
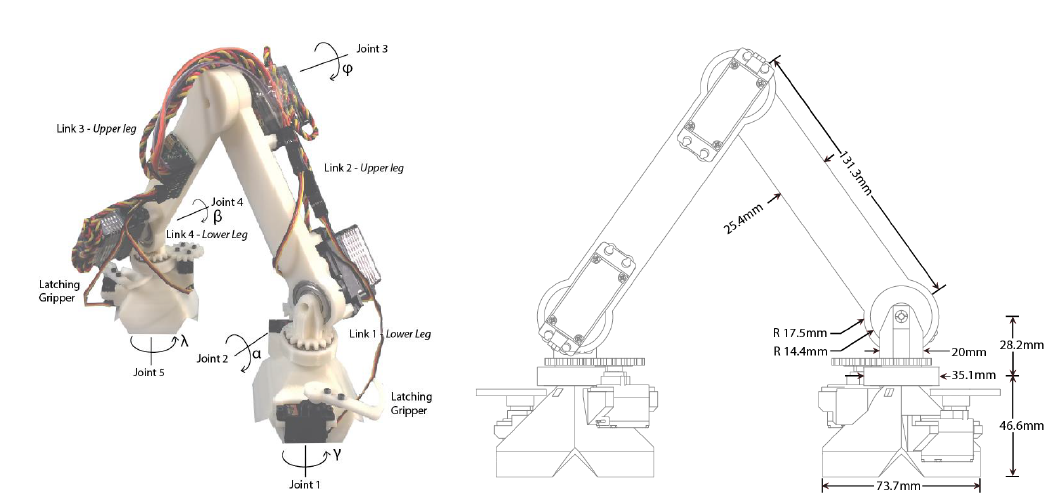
BILL-E is designed in such a way that its foot can attach itself onto the top of a voxel of the lattice structure. By doing so, translational constraints are applied to X, Y and Z directions. This restricts its motion to rotational motion only, thus, making it a relative robot.
HOW IT MOVES
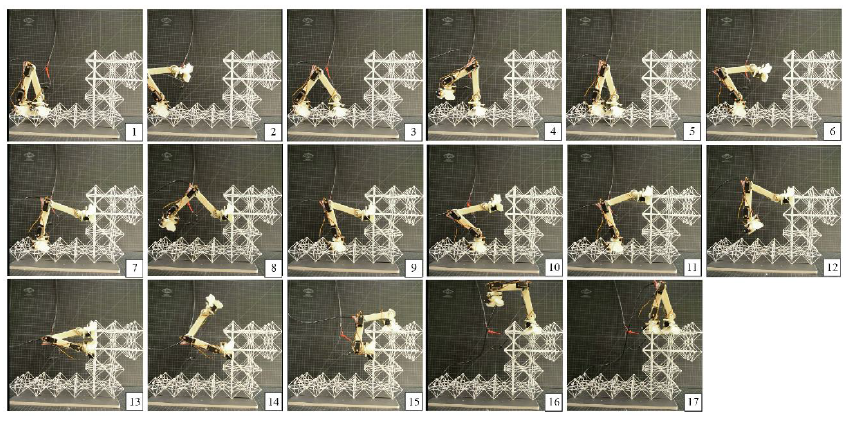
The figure above shows BILL-E climbing the convex and concave corners by taking single steps. In steps 1-5, BILL-E takes single steps forward. In steps 6-11, it approaches the concave corner by stepping up on the vertical face of the structure. In steps 12-13, it steps entirely onto the vertical face of the structure. In steps 14-15, it steps around the convex corner of the structure onto the top of the structure. In steps 16-17, it completes the sequence by stepping all the way onto the top of the structure.
HOW IT TRANSPORTS MATERIALS
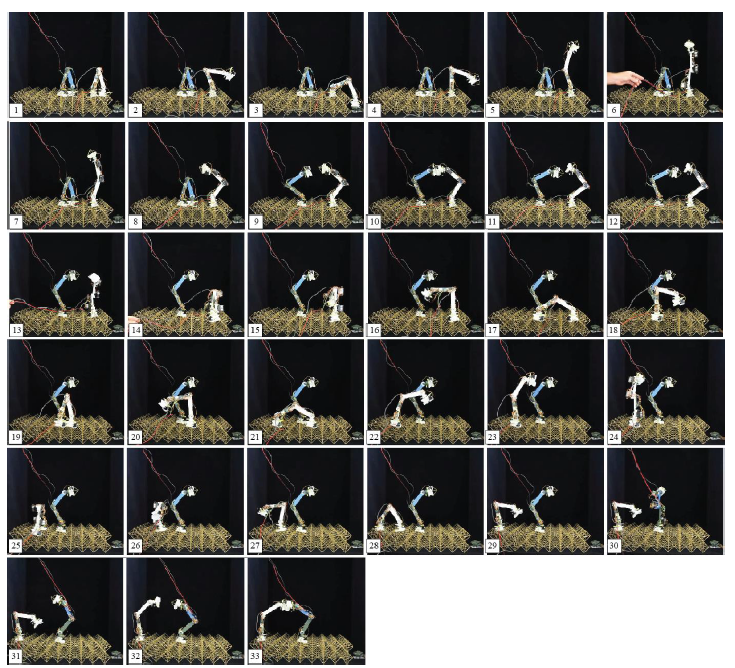
The figure above shows a first BILL-E robot coordinating with a second BILL-E robot to transport material from one position to another. In steps 1-9, the first BILL-E robot grabs and positions the part to be transferred to the second BILL-E robot. In steps 10-11, the part is handed off from the first BILL-E robot to the second BILL-E robot. In steps 12-29, the first BILL-E robot walks around to the other side of the second BILL-E robot and positions itself to receive the part. In steps 30-32, the second BILL-E robot rotates to hand off the part to the first BILL-E robot. In step 33, the robots are handing the part off.
APPLICATIONS
BILL-E has numerous applications in space. It can be used for construction, repair, and inspection of any lattice structure. For example, various type of lattice structures possible in outer space includes a pressure vessel, habitat, and hierarchical truss. The construction of hierarchical trusses can be made much more structurally efficient by using BILL-E.
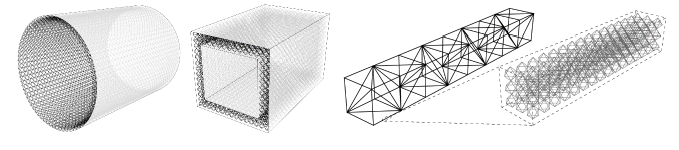
BILL-E can be used as a mobile and reconfigurable source of connecting large structures. BILL-E can also provide a number of services such as transporting material, active damping, attitude control, and macro scale connection for on-orbit operations, as shown in the figure below. Due to the rotational ability of BILL-E, it can also behave as a reaction wheel which is used for altitude control of satellites in the outer space. By acting as a secondary system to rotational wheels, BILL-E can save a considerable amount of fuel in the outer space. Lastly, BILL-E can also be used to construct large-scale robotic platforms such as cranes and arms by using BILL-E as a link between lattice structure.
WHAT IS YOUR TAKE?
So what do you think about BILL-E invented by NASA? Let us know in the comments below.
Source(s): NASA
Publication Number: US20170368679
Patent Title: Bipedal Isotropic Lattice Locomoting Explorer: Robotic Platform for Locomotion and Manipulation of Discrete Lattice Structures and Lightweight Space Structures
Publication date: 2017-12-28
Filing date: 2017-06-26
Inventors: Benjamin Jenett; Kenneth Cheung; Neil Gershenfeld
Original Assignee: United States Government As Represented By The Administrator Of The National Aeronautics And Spac