
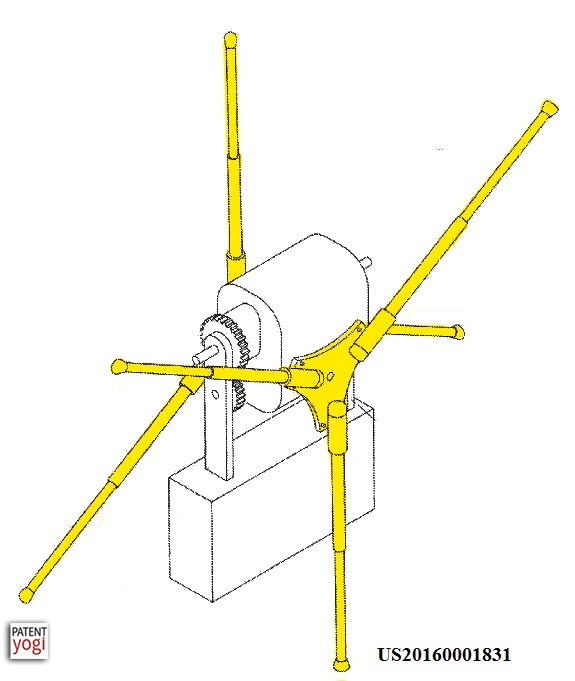
A group of inventors have filed a patent for a six-legged robot.
The robot is capable of running at high speeds using rotating legs. One motor is used to provide torque to a leg assembly while another motor allows the user to steer the running robot. A remote control enables a user to control both throttling (acceleration) and steering.
In order to provide stability, the majority of the weight of the robot is located below the axis of rotation of leg assembly. This keeps the center of mass of the system relatively low and below the axis of rotation. Applying torque between the center of mass and the hub allows for power and steering.
Patent Information
Publication number: US 20160001831
Patent Title: Multi-Legged Running Robot
Application number: US 14/596514
Publication date: 07 Jan 2016
Filing date: 14 Jan 2015
Inventors: Cotton; Sebastien
Original Assignee: Cotton; Sebastien