
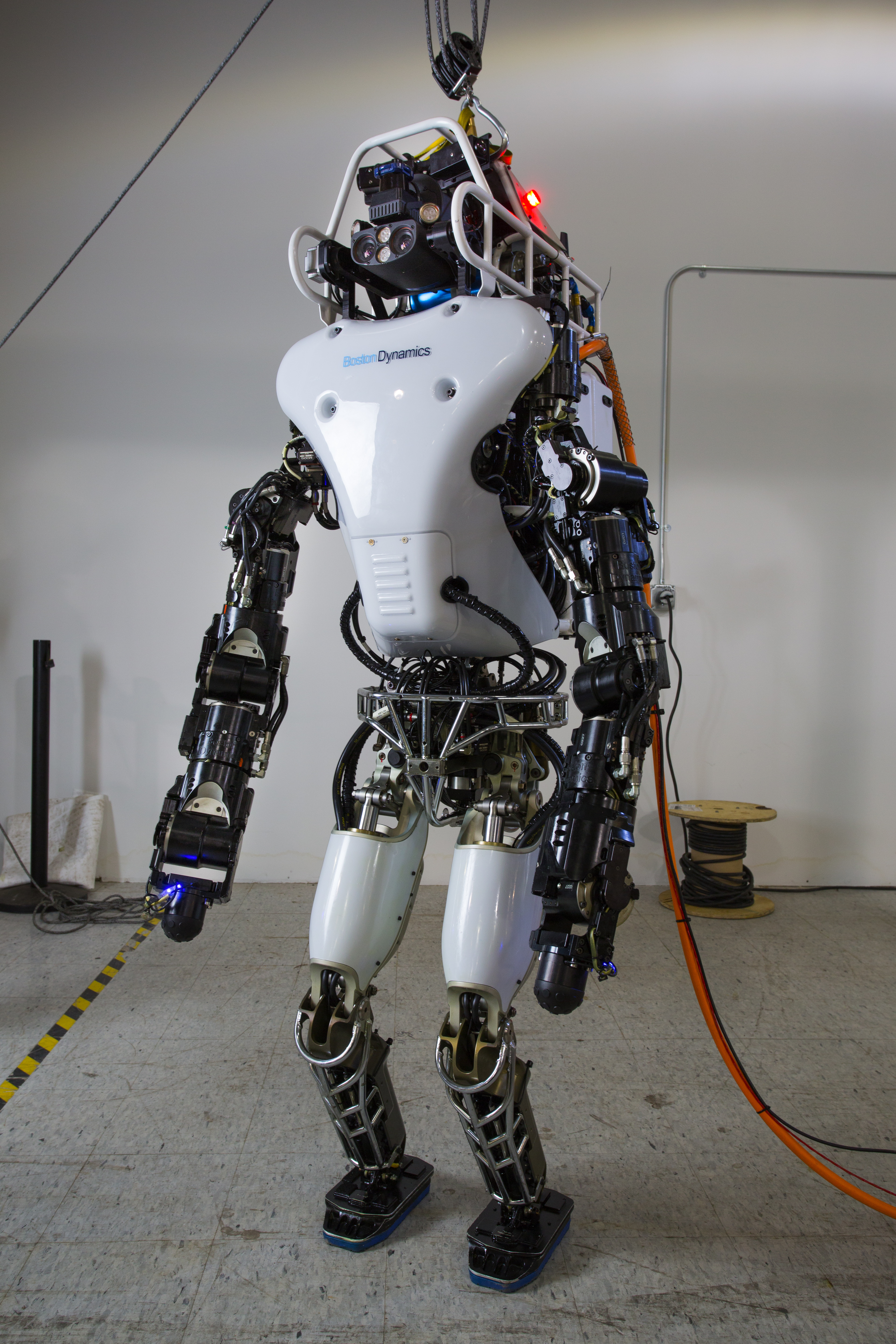
Earlier this week, Google owned Boston Dynamics’ released a video showing capabilities of their latest Atlas humanoid robot. The video shockedd the world, as the robot is eerily human-like. It is able to walk on uneven terrain, almost like humans.
This patent application from Google reveals some techniques that help these robot maintain balance while walking on such complex terrains. One crucial feature that helps the robots maintain balance is to continously montior the relationship between orientation of the robot body with the jointed limbs.
In some cases, a robotic device may be running and thus does not have any contact with the ground at certain points in time. The robotic device’s body may oscillate while running, such that a control device considering only the orientation measurement of the robotic device’s body may, at certain points in time, determine that the robotic device is unstable and thus requires a control effort to maintain balance. However, a relationship between the joint angles of the legs of the robotic device and the orientation of the body of the robotic device may indicate that the aggregate orientation of the robotic device has a far less severe oscillation compared to the body orientation of the robotic device. In these cases, a control system of the present disclosure reduces unnecessary control effort that may otherwise have been exerted.
The processing system provides instructions to control at least one jointed limb of the robotic device based on the estimated orientation of the robot. The instructions may correspond to maneuvering one or more of the limbs of the robot. For example, an instruction may cause a limb of the robotic device to move to a specific location and have a specific orientation. An instruction may also specify the manner in which to move the limb (e.g. how quickly the move the limb to the specific location). An instruction may further specify the amount of force that a particular limb applied to the ground or other surface.
Publication number: US20160052574
Patent Title: Natural Pitch and Roll
Application number: US 14/586519
Publication date: 25 Feb 2016
Filing date: 30 Dec 2014
Inventors: Alex Khripin; Alfred Anthony Rizzi;
Original Assignee: Google Inc.