
An autonomous vehicle operating on a road may rely on identifying lane boundaries for navigation. A computing device, configured to control the vehicle, may also be configured to have access to map information that may indicate the lane boundaries on the road. However, in some examples, the map information may include inaccuracies in estimation of the lane boundaries or may not be updated with road changes (e.g., construction zones, etc.). Also, lane marker detection systems may have challenges estimating the lane boundaries, such as having false positives occurring due to objects or shadows on the road that may exhibit characteristics similar to lane markers.
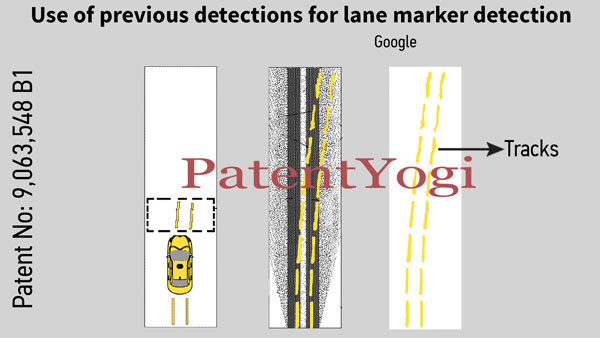
In an example, to estimate a lane boundary, the computing device may be configured to use lane information generated at previous time periods to estimate a projection of the lane boundary ahead of the vehicle. The lane information may include, for example, one or more of map information, position tracking information of one or more vehicles on the road, and an image depicting a lane marker. For instance, the computing device may be configured to use frames or images captured at previous time periods to project the lane boundary ahead of the vehicle. As an example for illustration, if the previous images depict a lane boundary as a straight line, the computing device may be configured to project the lane boundary as a straight line ahead of the vehicle.
Patent Number: 9,063,548 B1
Patent Title: Use of previous detections for lane marker detection
Inventors: Ferguson; David Ian (San Francisco, CA), Senlet; Turgay (Piscataway, NJ)
Assignee: Google Inc. (Mountain View, CA)
Family ID: 1000000305243
Appl. No.: 13/719,279
Filed: December 19, 2012
Abstract
Methods and systems for use of previous detections to improve lane marker detection are described. A computing device may be configured to receive lane information generated at previous time periods, and relates to detection of a lane boundary on a road of travel of a vehicle. The computing device may be configured to estimate, based on the lane information, a projection of a respective lane boundary ahead of the vehicle on the road. The computing device may further be configured to determine, based on a speed of the vehicle and geometry of the road, a level of confidence for the projection of the respective lane boundary. The computing device may also be configured to provide instructions to control the vehicle based on the projection and the level of confidence.