
Airbus has designed a hybrid-lift quadcopter, named Quadcruiser, for unmanned military and civil missions.
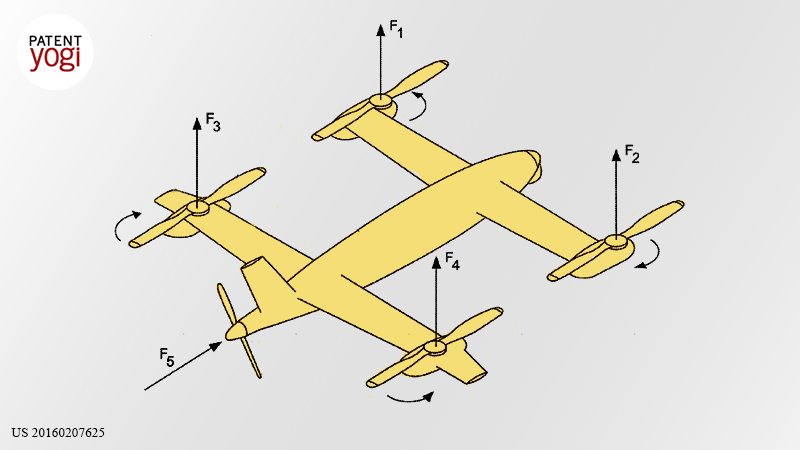
The Quadcruiser uses the popular four-rotor architecture and adds wings and a pusher propeller. The Quadcruiser has two flight modes–rotary-wing for maneuverability and fixed-wing for speed and efficiency. During transition to the fixed-wing aircraft mode, the pusher propeller accelerates the aircraft until its wings provide sufficient lift. Subsequently, the lift motors are stopped and their propellers adjusted to a low-drag position. Before landing, the aircraft transitions back to the quadcopter mode using its four lift motors, enabling a vertical landing.
The four-rotor architecture, commonly used in small unmanned rotorcraft, is paradoxically simpler than a design with a main rotor and a tailrotor. First, the aircraft gets rids of complex transmission gear. Second, the rotors have a fixed pitch, as control can be performed through differential speed variations. Third, the architecture is well suited to electric power, as each motor can be co-located with its rotor.
Due to its capabilities for cruise and hover flight, it can be operated in long range missions as well as in urban environments. Future applications are seen in various surveillance and reconnaissance missions for military as well as civil customers like police, boarder patrols and fire brigades.
The concept is completely independent of any launch and recovery systems like catapults, reducing the logistic footprint and providing a safe and simplified operation during takeoffs and landings.
Sources: AINOnline; Unmanned Systems Technology
Publication number: US 20160207625
Patent Title: Aircraft Capable of Vertical Take-Off
Publication date: 21 Jul 2016
Filing date: 29 Aug 2014
Inventors: Michael JUDAS; Friederike STRATENBERG; Jan VAN TOOR; Werner SCHOLZ; Berthold KARRAIS; Wolfgang STANGL;
Original Assignee: Airbus Defence and Space GmbH